How two flat photographs become depth — and how to solve the
NP‑hard problem hiding inside, ten times faster.
Igor Gridchyn & Vladimir Kolmogorov · IST Austria · ICCV 2013
scroll
You have two eyes, about six centimetres apart. Each sends your brain a
slightly different flat picture, and from the tiny disagreements between
them your visual system reconstructs depth — effortlessly,
continuously, before you are even aware of it.
Teaching a computer to do the same is one of the cleaner ways to walk
straight into an NP-hard problem. This is the story of a
paper I wrote with Vladimir Kolmogorov at IST Austria about doing it
anyway — and doing it roughly ten times faster than the state of the
art at the time. No background assumed: we will build every idea up from a
picture you can poke at.
What this demonstrates
Discrete optimization & graph cuts on an NP-hard labeling problem
A novel algorithm — problem complexity cut from O(k) to O(log k)
Roughly 10× faster than the state of the art at the time
Peer-reviewed at a top venue (ICCV 2013, with V. Kolmogorov)
Six short chapters, each with something to play with:
Igor Gridchyn & Vladimir Kolmogorov, “Potts model,
parametric maxflow and k-submodular functions” (IST Austria, ICCV 2013).
The full PDF is
available here.
The result images later in this piece are the paper’s own; the
interactive toys are illustrative — built to convey each idea
rather than reproduce the exact published numbers.
§
Chapter 01
Two eyes, one question
Hold a finger up at arm’s length and look at it while you blink one eye,
then the other. The finger jumps sideways against the background. Bring it
closer and the jump gets bigger. That jump — the disagreement between
your two eyes about where something is — is the entire raw material of
depth perception.
A computer sees the same way, given two cameras a few centimetres apart. The
cameras are lined up so that any real-world point lands on the same
horizontal row in both images; it only ever shifts left or right. That
horizontal shift is called the disparity. Near things shift
a lot, far things barely move, and the relationship is simple: depth is
proportional to one over disparity. Recover the disparity at every pixel and
you have recovered the shape of the scene.
So the whole task collapses to a single, repeated question: for this
pixel in the left image, how far do I have to slide to find its twin in the
right image? The candidate shifts — 0, 1, 2, … up to some
maximum — are the labels. Choosing a label for every
pixel is the labeling problem at the heart of this paper.
How does a pixel recognise its twin?
By looking at its neighbourhood. We take a small patch around the left pixel
and slide it across the candidate positions in the right image, and at each
shift we measure how different the two patches are — sum up the
squared differences in brightness. The shift where the patches match best
(lowest cost) is our answer. That per-pixel, per-label number is the
data cost: how much it “hurts” to assign a given
disparity to a given pixel.
Interactive · drag the marker on the left image
Left view — pick a pixel
Right view — the match slides along the row
Matching cost vs. disparity — the lowest point wins
Chosen disparity
–
Implied depth
Cost curve
–
Drag around and you’ll notice two regimes. On the textured surfaces the
cost curve has a sharp, unambiguous minimum — the patch fits in exactly
one place. But park the marker on the smooth, near-uniform region at the top
and the curve goes flat: dozens of shifts match almost equally well. The data
has no opinion. Pick the lowest point anyway and you’re basically
guessing.
This is the crack that runs through the whole problem. Choosing every
pixel’s lowest-cost label independently gives a crisp answer where the
image is rich and pure noise where it isn’t. To do better, the pixels
have to stop deciding alone — which is exactly where the next chapter
starts.
For the curious
Lining the cameras up so matches stay on one row is called rectification;
it follows from epipolar geometry and turns a 2-D search into a cheap 1-D one.
The patch-difference score here is the sum of squared differences (SSD); the
paper uses SSD aggregated over a 9×9 window, which sharpens those flat
curves considerably. Writing fi(a) for the data cost of
giving pixel i the disparity label a, everything below is
built on top of these numbers. The standard benchmark for this task is the
Middlebury stereo dataset (Scharstein & Szeliski, 2002–2007),
which the paper’s experiments use.
§
Chapter 02
The tug of war
Letting each pixel pick its own favourite label gives you a depth map that
looks like television static — right on average, wrong everywhere it
matters. The fix comes from a fact about the world: real surfaces are mostly
smooth. Your desk does not change depth every millimetre. Neighbouring pixels
almost always belong together.
So we add a second cost that pulls in the opposite direction. Every time two
neighbouring pixels are given different labels, we charge a fixed
penalty — call it λ. It doesn’t matter
whether the labels differ by one or by twenty; any disagreement costs the
same flat amount. (That “all disagreements are equal” rule is what
makes this the Potts model, borrowed from statistical
physics.) The total cost of a labeling is then a sum of two competing forces:
E(x) = Σi fi(xi)
+
λ Σ(i,j) [ xi ≠ xj ]data cost (trust the pixels) + smoothness cost (trust the neighbours)
Now no pixel decides alone. Turning λ up makes the labeling pay to
disagree, so it cleans up the static by letting confident neighbours
overrule noisy ones. Turn it up too far and it starts erasing real detail,
flattening small objects into their surroundings because keeping them costs
too many border penalties. Somewhere in between is the sweet spot.
Interactive · drag the smoothness slider
Labeling at this λ — crimson = a smoothness penalty paid
Ground truth
Error vs. λ
trust the datatrust smoothness
Error vs. truth
–
Disagreeing edges
–
Data cost
Smoothness cost
Watch the crimson lines — they mark every neighbour pair that disagrees,
which is precisely where the smoothness cost is being paid. At
λ = 0 the map is shot through with them and the error is
high. Nudge λ up and the static dissolves, the crimson thins, and the
error drops to its lowest. Push further and watch the error climb back up as
the small bright region gets swallowed whole. The error-vs-λ curve has
a clear valley — a preview of a plot we’ll meet again at the end,
drawn from the real experiments.
Here is the catch that makes this a research problem rather than a homework
exercise. Finding the labeling that genuinely minimises this energy —
the true bottom of the landscape — is NP-hard the
moment you have three or more labels. The toy above only fakes it with a
quick local heuristic. To do it properly and fast, we need a sharper tool.
For the curious
Formally the energy is
f(x) = Σi fi(xi) +
Σ{i,j}∈E λij[xi≠xj],
where [·] is the Iverson bracket (1 if true, 0 if false). Minimising it
is equivalent to a multiway-cut problem and is NP-hard for ≥ 3 labels
(Boykov, Veksler & Zabih, 2001), whose α-expansion algorithm
is the standard approximation. The interactive uses Iterated Conditional
Modes — a simple greedy optimiser that is easy to run live but provably
weak; the algorithms in the next three chapters are the real machinery.
§
Chapter 03
A cut is an answer
We left the last chapter with a wall: minimising the energy is NP-hard once
there are three or more labels. But hidden inside that hard problem is a much
easier one — and it turns out to be the single most useful tool in the
whole field. Drop down to just two labels, and the impossible
becomes not only solvable but fast.
Picture the simplest version of the task: every pixel is either
object or background. Each pixel has a data
cost for each choice (dark pixels would rather be background, bright ones
object), and neighbours still pay the Potts penalty when they disagree. We
want the lowest-cost split. There are 2(number of pixels) possible
splits — astronomically many — yet we can find the very best one
in a blink. Here is the trick that makes it possible.
Turn the picture into a plumbing network
Build a graph. Add two special nodes: a source standing for
“background” and a sink standing for
“object.” Wire every pixel to both, with pipe widths equal to its
two data costs. Then connect neighbouring pixels to each other with pipes of
width λ. Now ask a question that sounds unrelated: what is the
cheapest set of pipes you could cut to completely sever the source
from the sink?
That minimum cut is the answer. Every pixel ends up on the source side or the
sink side — that partition is a labeling. The cost of the cut
is exactly the energy of that labeling: severed data pipes are the
data costs you pay, and every neighbour-pipe you cut is one disagreeing
border. So the cheapest cut is the lowest-energy labeling, and a century-old
result (max-flow equals min-cut) lets us find it in polynomial time.
Interactive · drag the smoothness slider
Noisy input — brighter = more “object”
Min-cut segmentation — crimson = the cut
The graph behind it — a cut is a labeling
trust the datatrust smoothness
Total cost (min cut)
–
Boundary length
–
Guarantee
global optimum ✓
Slide λ from zero. At zero, the cut just follows each pixel’s own
preference and the boundary is ragged, chasing every speck of noise. Raise it
and the boundary pays for length, so it tightens around the real object and
the noise is overruled — the same tug of war as before, but now solved
exactly. The number it reports isn’t a heuristic’s best
guess; it is provably the global minimum. There is no better split.
So two labels are a solved problem. The catch, of course, is that stereo has
sixty. The cut only knows how to draw one border between two regions, and
real depth maps have many. The obvious move — and the one the field took
— is to use this two-label superpower as a repeated move:
again and again, ask “should any of these pixels switch to label
α?” and let a min-cut decide. That is α-expansion. The next
two chapters take a different, sharper route with the very same tool.
For the curious
The construction works whenever the pairwise term is submodular —
for two labels the Potts penalty always is, so a single min-cut returns the
exact global optimum (Greig, Porteous & Seheult, 1989; Kolmogorov &
Zabih, 2004). The interactive runs Dinic’s max-flow on the real graph;
the cost it prints is the max-flow value, which equals the min cut by the
max-flow/min-cut theorem. For more than two labels the problem returns to
NP-hard, and α-expansion (Boykov, Veksler & Zabih, 2001) applies
this binary cut iteratively — each iteration optimal, the whole only
approximate.
§
Chapter 04
Answers for free
Here is a thought that sounds too good to be true. The full problem is
NP-hard — but what if, before paying for the expensive solver, you could
prove the correct label for most of the pixels using nothing but the
cheap two-label cuts from the last chapter? Not guess. Prove. And what if
“most” meant eighty or ninety percent of the image?
That is exactly what persistency — also called partial
optimality — delivers. The idea, due to Ivan Kovtun, is disarmingly
simple. Pick one label, say “disparity 7,” and ask a single
binary question of the whole image: label 7, or anything-but-7?
That is a two-label problem, so one min-cut answers it exactly. The pixels the
cut hands to “7” come with a guarantee: there exists a global
optimum of the full problem in which those pixels really are 7.
They are persistent. You can lock them in and never look at
them again. Run that binary question once per label, and you peel off a
certified piece of the optimal solution each time — for the price of one
max-flow apiece.
Interactive · run the auxiliary cuts
Certified so far — grey = not yet proven
Full solution — free + solved
0%
certified for free
Max-flows run
0 / 6
Left for the hard solver
100%
Guarantee
provably optimal ✓
In the real paper — fraction certified for free on Middlebury stereo
Step through it. Each click runs one auxiliary cut and freezes the pixels it
can prove, painting them in. After all six, the grey has nearly vanished:
the great majority of the image is solved and certified optimal,
while only a stubborn residue — the genuinely ambiguous pixels, mostly
along object edges — is handed to the expensive solver. That is the
whole game: shrink the NP-hard problem before you ever pay for it.
And this isn’t a toy-scale effect. On the standard Middlebury stereo
benchmark, the fraction the method certifies for free ranged from about
50% to 93% of the image (the bars above are the paper’s
actual numbers). The expensive second phase then only has to solve what little
is left — which is why the whole pipeline ends up roughly ten times
faster than the previous state of the art. We’ll see those timings in
the final chapter.
But there is still something wasteful here. We ran one cut per label
— sixty cuts for a sixty-disparity stereo problem. The central
contribution of the paper is realising you don’t need sixty. You need
about six. That is the next chapter.
For the curious
Persistency for the “one-against-all” auxiliary problem is
Kovtun’s result (Kovtun, 2003); the auxiliary energy is constructed so
that its min-cut solution is guaranteed to extend to a global optimum of the
original, which is what makes the labeled pixels safe to fix. The interactive
runs the real auxiliary max-flows; the “full solution” panel is
the two-phase pipeline — persistent labels fixed, then α-expansion
on the non-persistent remainder, exactly as in the paper — so the
certified pixels are always a subset of it. The paper also studies ways to
increase the persistent fraction (the “MP” procedure),
with the biggest gains at λ = 0.
§
Chapter 05
From k cuts to log k
The previous chapter spent one min-cut per label. That is the wasteful part,
and fixing it is the heart of the paper. The fix is an idea you already use
every day without naming it: to find a number between 1 and 60, you
don’t check all sixty — you ask “higher or lower?” and
halve the range each time. Binary search. The trick is doing that search for
every pixel at once, with a single min-cut deciding the whole image
at each step.
Lay the candidate labels out as the leaves of a balanced binary tree. The
root holds the whole range; its two children split it in half; their children
split again, and so on down to single labels. Now walk down the tree one level
at a time. At each level a single binary question is posed to the entire
image — is your label in the lower half of your current range, or the
upper? — and, because that is a two-label problem, one min-cut
answers it exactly for every pixel simultaneously. Each answer halves every
pixel’s range.
Halve sixteen labels four times and you are down to one. The depth map
resolves from a flat blank into coarse bands, then finer ones, then full
detail — in four cuts rather than sixteen.
Interactive · run the cuts, watch it resolve
Label tree — each cut descends one level (16 labels → depth 4)
Depth map resolving — candidate range halves each cut
SPLIT (this paper)
0
Naive Kovtun
16
max-flows to label the image
Cuts run
0 / 4
Candidates / pixel
16
For a 60-disparity stereo problem the saving is starker still: 7 cuts instead of 60 — that is the ⌈1 + log₂ k⌉ bound.
The accounting is the punchline. Kovtun’s original method needed
k max-flows; this needs the depth of the tree, which is
about log₂ k. The cuts at any one level act on disjoint sets of
pixels — each pixel is in exactly one sub-problem — so a whole
level costs no more than a single max-flow on the original image. Sixteen
labels: four cuts. Sixty labels: seven. The bigger the label set, the bigger
the win, which is exactly why it matters for stereo, where k is large.
That is the contribution in one sentence: the same certified answer
Kovtun gives in k max-flows, obtained in ⌈1 + log₂ k⌉
of them. Combine it with the persistency of the last chapter —
label most of the image for free, in logarithmically few cuts, then hand the
small remainder to a fast solver — and you have the whole pipeline. The
final chapter shows what that buys in wall-clock time, and a result that
genuinely surprised us.
For the curious
The construction reduces minimising the Potts energy to minimising a
function with a tree metric on the label set — a star graph
rooted at an auxiliary label — whose unary terms are
T-convex. The paper generalises the Tree-Metrics algorithm of
Felzenszwalb et al. to these more general unaries; balancing the star into a
binary tree (an edge-insertion step) is what makes each split even, giving
the ⌈1 + log₂ k⌉ depth. By the
coarea formula, the binary cuts across all levels are nested and
consistent, so they can equivalently be obtained from a single
parametric max-flow (Gallo, Grigoriadis & Tarjan, 1989). The paper
also frames the whole thing through k-submodular functions,
generalising bisubmodularity and roof duality (QPBO) to more than two labels.
§
Chapter 06
The payoff
Theory is only worth so much; the question a practitioner asks is
“how fast, and how good?” So we ran it on the standard testbed for
this problem — the Middlebury stereo benchmark — against the
fastest published method for the same task. Here is what came back.
Wall-clock runtime on the Middlebury stereo benchmark (milliseconds; shorter
is better). Phase 1 of the new method — k-sub Kovtun — is
roughly ten times faster than the previous state of the art
(“Reduce,” Alahari et al. 2010); the full pipeline with FastPD
stays well ahead. Numbers are Table 1 of the paper.
The first phase — labeling most of the image for free, in
logarithmically few cuts — runs about ten times faster
than the previous state of the art (“Reduce”). Even the complete
pipeline, which then cleans up the non-persistent remainder with a fast
solver, stays comfortably ahead. On the easy images, where almost everything
is certified, the whole thing finishes in a couple of hundred milliseconds.
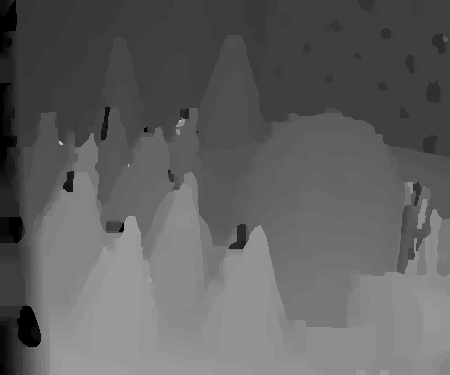
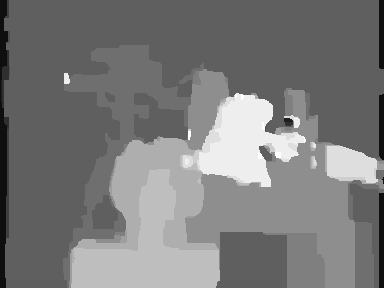
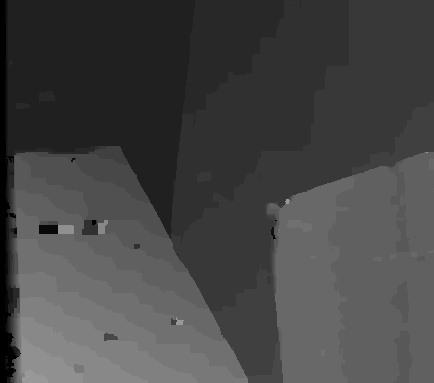
But speed was expected. The result that genuinely surprised us was about
quality. Look at the actual disparity maps — flip between the
cheap certified labeling and the full optimisation:
Interactive · flip between the cheap and the full result
ConesTeddyTsukubaVenus
Showing: Kovtun’s certified labeling
They are nearly indistinguishable. And when we measured error against ground
truth, the cheap Kovtun labeling was, in the majority of cases, more
accurate than the full α-expansion solution — even though
α-expansion reaches a lower energy. That sounds paradoxical until you
remember what energy is: a model of the world, not the world itself.
Driving the energy to its absolute minimum optimises the model harder, and the
model’s small biases harder along with it. The certified pixels are the
ones the data was sure about in the first place — so the part we can
prove is also the part that is most often right.
The part of the answer we can prove for free turns out to be the part most
likely to be correct.
The practical reading is liberating: for a time-critical system — a
robot, a camera, anything with a deadline — you can stop after the cheap
phase and ship a labeling that is both fast and, on these benchmarks, often
better. The expensive global optimum is optional.
Why a stereo paper sits in an AI portfolio
This work is older than the deep-learning era, and stereo depth is largely a
learned problem now. I keep it here for what it shows about how I
think, which has not dated. Three habits run through it and through
everything I have built since. First, find the structure that makes a
hard problem easy — the whole paper turns on noticing that a
k-way labeling hides a binary search. Second, earn guarantees rather
than hope for them: persistency is a proof, not a heuristic, and
knowing which of your outputs are certified is exactly the kind of
calibrated confidence modern ML systems are still scrambling to provide.
Third, respect the gap between the objective and the goal
— the surprise in this paper is a small, friendly version of the
reward-hacking and over-optimisation problems that define a lot of frontier AI
work today.
Faster algorithms, provable partial answers, and a healthy suspicion of the
objective you are minimising: that is a toolkit, and it transfers. If your
team is working on problems where those instincts would help, I would love to
talk.
The full pipeline is “k-sub Kovtun” for phase 1 (the
log k persistency) followed by FastPD (Komodakis et al.) on
the non-persistent pixels for phase 2; initialising FastPD from Kovtun’s
labeling also sped phase 2 up by ~14% over the standard initialisation. The
error-rate comparison is measured against the Middlebury ground truth
(Scharstein & Szeliski); error over the persistent subset is lower still
than over the whole image. Images and timings are from the paper —
Gridchyn & Kolmogorov, ICCV 2013.